
研究題目:反復運動スキルを対象とした熟達化支援
研究番号:15K01072
1. Introduction
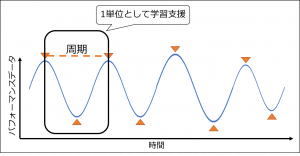
本研究室では,反復運動を対象とした,運動スキル開発の新しい支援手法の提案に取り組んでいます.運動スキルとは,スポーツに代表されるような身体動作を伴う課題を,適切な身体制御や知識を持って遂行する能力です.運動スキルは,遂行する運動の特性によって性質が異なります.我々は,それらの運動の中でも,反復運動に注目しています.反復運動は,連続した流れのある運動であり,かつ同じような動作を繰り返す運動です.様々な反復運動の内,フラフープと縄跳びに焦点を当て,研究を行っており,これらの運動は,図のような特徴的なパフォーマンスデータが計測されます.波形の極大値から次の極大値,または極小値から次の極小値は,その運動の周期と捉えられます.周期は,動作のタイミング,力の程度,フォームなどで変化するため,波形にその影響が現れます.我々は,各周期の動作を1単位とみなし,学習支援を行っています.学習支援には,学習者の観測と,それに応じた教示が必要です.
2. Purpose
反復運動の遂行には,様々な難しさが存在します.その一つとして,フラフープや縄跳びは道具を使った運動であるため,自身の身体制御とともに,道具の制御も欠かせません.そのため,フラフープに対する支援では,まずフープへの加振タイミングに着目して学習者への支援を行うことで,フラフープにおける継続時間の引き伸ばしを目指します.さらに,フープが腰より落下しなければ,運動が続くことに焦点を当て,フープと腰の高さの差を減少させることを目的とした支援も行います.
一方,縄跳びでは,まず初学者に焦点を当て,運動スキル獲得の初期段階として,跳躍と手の回旋とを組み合わせた運動を獲得させることを目的に訓練を支援します.ただし,通常の訓練では,初学者は運動を続けることができず,効率が悪いため,縄なし訓練を採用します.これにより,反復運動である特徴を考慮した訓練で,動作間の協調の学習を促します.そして,縄跳びの中級者に焦点を当て,動作のタイミングに着目し,運動の安定化を目指す支援も行っています.フォームや力の入れ具合などの縄跳びの継続のための技能を有しているにも関わらず,中級者が失敗してしまうのは,許容範囲を脱する適切ではないタイミングでの動作を行ってしまうためです.そのため,支援によって適切なタイミングでの動作を促します.
3. Methodology
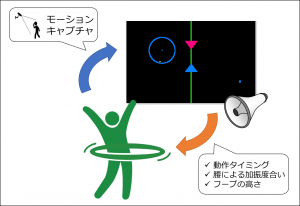
フラフープの支援として,我々は,モーションキャプチャを使用して学習者を観察しています.フラフープは,腰を動かしてフープに加振することで,連続的に行う運動です.フラフープを行う際,運動者の腰とフープには,一定の関係性が観測されます.例えば,腰の動作に遅れてフープが追従することです.また,フープを回す腰の位置とフープの周期にも関連があることがわかっています.そのため,これらをもとに同期的な支援を行っています.具体的には,動作タイミングをサポートするシステムを設計・構築しました.計測した学習者の腰やフープのデータを利用し,加重平均を利用して現在のフープの位相を仮定,次のフープ波形における極大点を推定,腰とフープの波形の位相差による腰の動作タイミングの予測を行います.システムは,そのタイミングを視覚情報として,モニタに四角形を表示し,上下することでタイミングを提示します.そして,これを発展させたシステムとして,動作のタイミングに加え,腰による加振度合い,フープの高さをサポートするシステムを設計・構築しました.システムは,回帰分析によるフープを回す腰の位置からフープの周期を予測するモデルを保有します.支援において,目標値を提示するのではなく,誤った方向への学習を打ち消し、正しい方向への学習を促す支援を与えることで,学習を効果的に行う工夫を行っています.また,システムは,腰とフープの波形の位相差を予測するモデルも保有しており,動作タイミングの支援につなげます.システムが学習者に支援を行うインターフェースとして,映像と音を用意しています.映像には,現在のフープの状態,システムからの動作タイミングと加振度合いの指南がアニメーションとして含まれます.加えて,音の高低によってフープの位置を適正な腰の位置に誘導します.
縄跳びの支援の一環として,まず技の差に着目して支援につなげる方法を模索しました.前二重トビは,前一重トビと比べ,一跳躍中に手の回旋が一回増えた技であるといえます.そのため,手の回旋に焦点を当てて,運動をカメラで撮影し,画像処理による解析を行いました.その結果,前二重トビの熟達者と初学者の間に差が見られました.熟達者は一定の範囲で手の回旋を行うのに対し,初学者は跳躍ごとにバラバラな手の回旋の軌道を描きます.前二重トビと前一重トビとの差として,跳躍の高さも見られました.
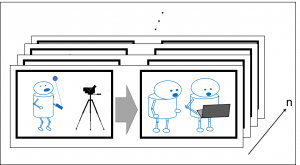
他の,画像処理による解析を利用する支援として,縄なし訓練によって前二重トビのスキル獲得を支援するシステムを設計・構築しています.前二重トビは大別して跳躍と手の回旋に分かれますが,各動作を3つずつの要素に分解し,それらの組み合わせを考慮することで,前二重トビを体現可能な身体制御の獲得を目的としています.学習者のパフォーマンスを体現後に熟練者データをもとに評価し,それを視覚的に教示します.学習者のパフォーマンスデータのみではなく,熟達者の動画を棒人間としてデフォルメ化した参考動画も表示することで,次の訓練につなげます.そして,次の段階として,縄を使用した実践的な訓練の前に設けた,前二重トビを仮想的に体現する訓練をサポートするシステムを設計しました.縄ありの前二重トビ訓練は,すぐに失敗してしまう初学者には,連続跳躍の訓練ができません.そのため,細工を行った縄を使用し,身体の協調動作を訓練します.このシステムによって提示される参考動画によって,手の回旋における軌道や速度の目標値と自身の体現を比べることで,次の体現に向けて自身の身体を動かして戦略を立てます.図のように繰り返し訓練を行うことで,前二重トビの熟達を目指します.
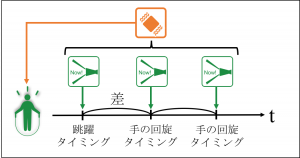
一方,装着型のシステムを使用した支援も行っています.前二重トビの運動タイミングに着目すると,跳躍と手の回旋にはタイミング差が存在します.このタイミング差が一定に近づくことで運動が安定すると仮定し,適切なタイミングを同期的に指示します.前二重トビの観察に,跳躍については加速度を,手の回旋については筋電位を計測することで,各動作のタイミングを同定します.次の支援タイミングの決定は,固定値によって行われ,タイミングは音を鳴らすことで知らせます.そして,このシステムを拡張する形で,次の支援タイミングの決定に回帰分析を利用します.加えて,学習者の体現中により多くの情報を与えるために,振動を支援に加えます.これにより,身体の協調動作の訓練を試みています.
教示に関して,実際の教育現場では,スポーツオノマトペと呼ばれる擬音語・擬態語が活用されています.そのため,スポーツオノマトペを支援に活用すべく,研究を進めています.具体的には,スポーツオノマトペを文字で表現することで視覚的な情報に変換する手法や,スポーツオノマトペの理解を助けるようなウェアラブルシステムの開発を行っています.
4. Findings and Improvements
提案したシステムの支援の有効性を検証するために,評価実験を行いました.実験結果より,運動者の腰とフープ間の位相差の改善量において,運動中に支援を受ける群と運動後に支援を受ける群との間に有意な差が見られました.これにより,フラフープにおいて,位相差の改善には,運動と同期的な視覚的な支援の有効性が示唆されます.また,フープの高さを考慮して支援を行うシステム,一定の支援を行うシステム,支援を行わないシステムの三つで評価実験を行った結果,フープの高さの改善量において,フープの高さを考慮して支援を行うシステムと支援を行わないシステムを使用した学習者間で,有意な差が見られました.これにより,システムからの視覚的な動作タイミングと加振度合いの指南は,フラフープ学習へ一定の効果があると考えられます.
加えて,前二重トビへの支援システムを用いた評価実験の結果より,運動要素の組み合わせを考慮した訓練を提案するシステムと運動要素を個別に取り上げた訓練を提案するシステムの間に,学習者の前二重トビ成功率の変化において差が見られました.これにより,運動要素の組み合わせを考慮した訓練が,前二重トビの上達に寄与することが示唆されます.また,装着型のシステムを使用した前二重トビへのタイミング支援に対する実験において,システムの支援を受けた群と支援を受けなかった群の間の差に,優位な傾向が見られました.これにより,前二重トビへのタイミング支援において,音による運動と同期的な支援の有効性が示唆されます.
以上のように,反復運動であるフラフープと縄跳びを取り上げ,運動を遂行するために必要なスキル獲得の支援を行いました.提案したシステムは,運動のある一部分や要素に着目した支援を行っていますが,これら研究成果をもとに,その運動に対する包括的な支援を行う必要があります.そのためには,学習者に関するより多種なデータを計測することや,視覚・聴覚・触覚などに対する効果的な複合提示方法の検討が考えられます.
Reference
以下の発表論文より
- 豊岡 寛旨, 松浦 健二, 後藤田 中 : フラフープにおけるスタンスと運動方向の一考察, 教育システム情報学会第40回全国大会講演論文集, 183-184, 2015年9月.
- 吉岡 真也, 松浦 健二, 後藤田 中, カルンガル ギディンシ ステファン : 前一重トビから前二重トビへのスキルアップ支援の試み, 教育システム情報学会第40回全国大会講演論文集, 125-126, 2015年9月.
- Shinya Yoshioka, Kenji Matsuura and Naka Gotoda : Hand-motion analysis for development of double-unders skill, 19th International Conference in Knowledge Based and Intelligent Information and Engineering Systems – KES2015, 775-783, Singapore, Sep. 2015.
- Hiroshi Toyooka and Kenji Matsuura : Development of a system to imply well-timed action in a drill practice of motor actions, Proceedings of 11th International Conference on Knowledge Management, 321-328, Osaka, Nov. 2015.
- 菅原 宏太, 豊岡 寛旨, 松浦 健二, カルンガル ギディンシ ステファン, 後藤田 中 : 反復運動を対象とした基本運動の統合化学習支援, 教育システム情報学会第41回全国大会講演論文集, 117-118, 2016年8月.
- 豊岡 寛旨, 菅原 宏太, 松浦 健二, カルンガル ギディンシ ステファン, 後藤田 中 : 操作機器を有する反復運動における身体制御の学習支援システム, 教育システム情報学会第41回全国大会講演論文集, 119-120, 2016年8月.
- Yoshikawa Takehiko, Kenji Matsuura, Stephen Githinji Karungaru and Naka Gotoda : Skill Learning Support System Focusing on Rhythm Fitting, Journal of Shikoku-Section Joint Convention of the Institutes of Electrical and Related Engineers, 267, Sep. 2016.
- Kohta Sugawara, Hiroshi Toyooka, Kenji Matsuura, Stephen Githinji Karungaru and Naka Gotoda : Development of a Gross Motor Skill by Combining Primitive Motions in Repetitive Exercise, Proceedings of IEEE 5th GCCE, 488-492, Kyoto, Oct. 2016.
- Hiroshi Toyooka, Kenji Matsuura and Naka Gotoda : A Learning Support System Regarding Motion Trigger for Repetitive Motion Having an Operating Instrument, Proceedings of 13th IADIS International Conference of CELDA, 33-40, Mannheim, Germany, Oct. 2016.
- 吉川 健彦, 菅原 宏太, 松浦 健二, カルンガル ギディンシ ステファン, 後藤田 中 : 統合反復運動を学習支援するための装着型システム, 教育システム情報学会第42回全国大会講演論文集, 243-244, 2017年8月.
- 菅原 宏太, 吉川 健彦, 松浦 健二, カルンガル ギディンシ ステファン, 後藤田 中 : 訓練複合戦略に基づく統合運動スキル学習支援, 教育システム情報学会第42回全国大会講演論文集, 187-188, 2017年8月.
- 中原 輝, 石岡 匠也, 後藤田 中, 國枝 孝之, 松浦 健二, カルンガル ギディンシ ステファン, 林 敏浩, 八重樫 理人 : スポーツオノマトペの理解を支援するウェアラブルシステムの提案, 電子情報通信学会技術研究報告, Vol.117, No.296, 57-60, 2017年11月.
- 蓮井 宏輔, 後藤田 中, 國枝 孝之, 松浦 健二, カルンガル ギディンシ ステファン, 林 敏浩, 八重樫 理人 : スポーツオノマトペのコミックフォント表現システムを活用した運動学習の提案, 電子情報通信学会技術研究報告, Vol.117, No.296, 61-64, 2017年11月.
- Takehiko YOSHIKAWA, Kohta SUGAWARA, Kenji Matsuura, Stephen Githinji Karungaru and Naka Gotoda : Observing the Degree of Distortion in Coordinated Motor Actions, Proceedings of 25Th ICCE, 415-420, Christchurch, NewZealand, Dec. 2017.
- Kohta SUGAWARA, Takehiko YOSHIKAWA, Kenji Matsuura, Stephen Githinji Karungaru and Naka Gotoda : A Learning Support System for Integrated Motor Skill by Organized Training Stages, Proceedings of 25Th ICCE, 451-456, Christchurch, NewZealand, Dec. 2017.
- 吉川 健彦, 松浦 健二, 菅原 宏太, カルンガル ギディンシ ステファン, 後藤田 中 : 二重跳びにおける身体部位間の運動タイミング差の安定化支援, 日本教育工学会論文誌, Vol.41, No.Suppl., 229-232, 2017年.
- 中原 輝, 蓮井 宏輔, 石岡 匠也, 後藤田 中, 國枝 孝之, 松浦 健二, カルンガル ギディンシ ステファン, 米谷 雄介, 林 敏浩, 八重樫 理人 : 学習者に対し熟達者の動きの認識を目標に 共有された試技動画およびセンサを活用した学習環境, 電子情報通信学会技術研究報告, Vol.117, No.469, 71-76, 2018年3月.
- 蓮井 宏輔, 中原 輝, 石岡 匠也, 後藤田 中, 國枝 孝之, 松浦 健二, カルンガル ギディンシ ステファン, 米谷 雄介, 林 敏浩, 八重樫 理人 : スポーツオノマトペの直感的な意図を表現するコミックフォントを用いた運動学習支援システム, 電子情報通信学会技術研究報告, Vol.117, No.469, 77-82, 2018年3月.
- Kenji Matsuura, Hiroshi Toyooka, Stephen Githinji Karungaru and Naka Gotoda : Design of a Guide System for Motor Skill Development Targeting a Repetitive Movement Task, Information and Systems in Education, Vol.17, No.1, (in-press), 2018.