
Welcome to Yasuno Suzuki Laboratory
We are located within Tokushima University in Japan. We conduct research related to intelligent systems in the areas of control systems and information science. The major research areas are agriculture, mobile robot, renewable energy, and welfare.

Mobile robot for orchard sites
Working in an orchard is hard due to slopes and rough terrain. The robot helps weeding work and carrying the harvest. We study on a human following algorithm and autonomous map creation and mapping.

Pesticide spray robot
The robot works in green-house and spraying pesticide along the lanes. The lidar mounted on the robot detects surrounding obstacles, then the robot avoids them. The moving path plan and the map are created in advance.

IoT based crop monitoring
Temperature and humidity 3D sensor network helps analyzing its distribution and bias in green-house. Then the climate control system can then take appropriate steps to maximize the yield.

Forecast of PV / wind power output
The generation output of renewable energy fluctuates depends on climate condition such as wind speed and solar irradiance. And it affects power systems operation. Forecast of generation helps electric power system stabilize.

Intelligent assistive wheelchair
Electric wheelchairs allow people to travel farther. However, there are concerns about driving difficulties depending on the road surface conditions, and traffic accidents. Intelligent assist for driving solves the problems.
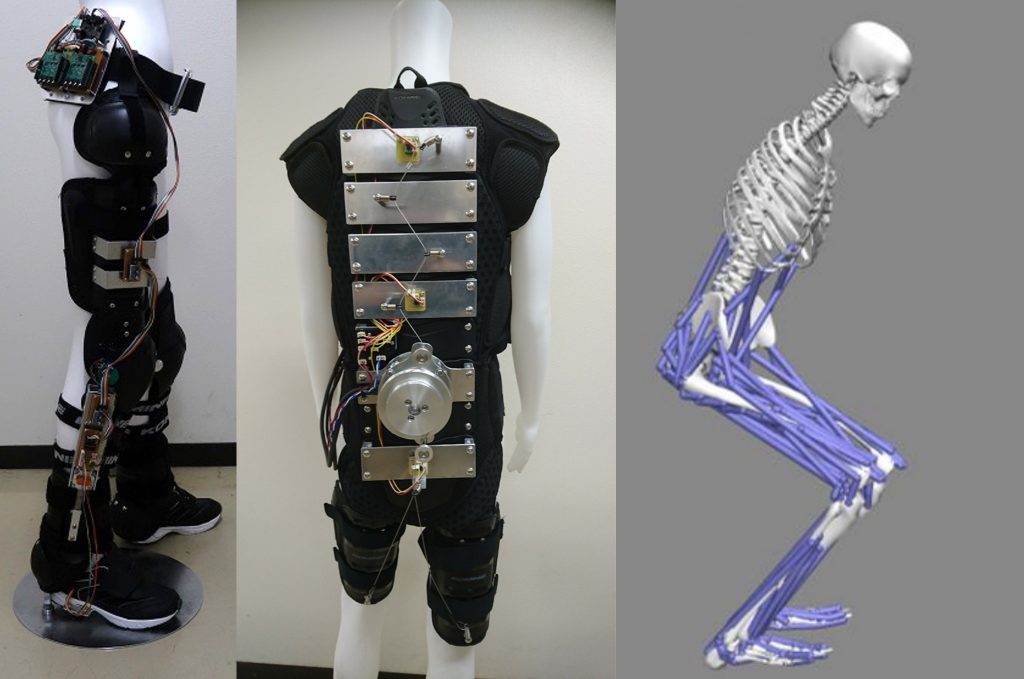
Power assist exoskeleton robot
Nursing care, transportation of heavy objects in agriculture, logistics is heavy burden, and there are concerns about its impact on human health. The developing robot with passive and active architectures helps human with low energy.

Self-driving vehicle
Cars are an important infrastructure for transportation in rural areas. In addition, the demand for automated driving will increase due to the aging population. Autonomous driving algorithm assuming such an environment has been researching.

Multiple mobile robots
Security work can be done efficiently by multiple mobile robots working together. It is important to consider the cooperation algorithm to complete tasks with low energy.

Robot with biological mechanisms
The robot with biological mechanisms realizes its natural and efficiently motion. Also, creating CPG signal to control motors is important. The legged robot and hopping robot have been developing.